
Das neue Kardan-Gelenk
+++ Aus aktuellem Anlass (Februar 2018): Die Firma Soltuuli hat beim Deutschen Innovationspreis 2018 (Preisgeld = 0€, dafür gratis "Werbung") mit dem neuen Gleichlaufgelenk leider wie auch vorher mit den Windmühlen natürlich wieder nichts gewonnen. +++
Anmerkung: Der von der WirtschaftsWoche gelobte "Wettbewerb der Ideen" sieht dann so aus: Die Firma Google erfindet die Datenbrille. Nun sind Firmenchefs begeistert, denn damit lassen sich viele Arbeitsplätze einsparen und damit Gewinne maximieren. Um sie in Europa zu vermarkten, gründete man zwei Firmen: Picavi und 2011 Ubimax. Weil da viel Kapital dahinter steht, sind "Innovationspreise" schon vorprogrammiert. Und so stand schon vor dem Deutschen Innovationspreis 2018 Ubimax in der Kategorie "Start-Up" als Nominierter fest. Um die Firma Picavi nicht zu enttäuschen, bekam sie dafür in der WirtschaftsWoche 17/3/2017 einen tollen PR Artikel. Dass Ubimax die Kriterien des vom Bundesministerium für Wirtschaft und Energie geförderten Wettbewerbs nicht erfüllt (Gründung nicht älter als 5 Jahre), spielt da dann keine Rolle, schließlich gibt die Datenbrille den Arbeitgebern die totale Kontrolle über die Arbeitnehmer. Als Tochter von Google braucht Ubimax die gratis Werbung sicher nicht, offensichtlich spekulieren aber die deutschen Sponsoren (Daimler, EnBW, accenture, Holtzbrinck Verlagsgruppe) des Preises auf gratis Gegenwerbung bei der US-Firma Google. Und der Firma Soltuuli lädt man für den Scheiß als Kulissen-Claquer auch noch Kosten auf. - Die Firma Soltuuli gratuliert den deutschen Eliten trotzdem.
Vollkugel! Das neue Modell ist nun fertig! Jetzt kann ich auch Winkel weit über 90° realisieren. Mathematisch bis 180°, was aber technisch nicht geht, da man keine unendlich dünnen Stangen nehmen kann.
Beim klassischen Kardan-Gelenk sind zwei Achsen senkrecht zur Drehachse um 90° verschoben und miteinander verbunden. Damit lässt sich ein Drehmoment "um die Ecke" übertragen. Allerdings hat das herkömmliche Kardan-Gelenk den sogenannten "Kardan-Fehler". Das Drehmoment wird nicht 1:1 übertragen sondern geht mal etwas vor und mal etwas nach und zwar umso stärker, je größer der Winkel ist, um den die beiden Drehachsen differieren.
Das klassische Kardan-Gelenk
mit den Achsen
Auswirkung:
Sitzt man bei einem Traktor auf einem Anhänger mit einer Maschine, die über eine Kardan-Welle mit dem Motor des Traktors verbunden ist und fährt der Traktor eine Kurve, dann fängt die Maschine an zu rütteln, bis Traktor und Anhänger wieder in einer Reihe liegen. Das ist nicht gut für das Material.
Andere Anwendungen des neuen Gleichlaufgelenks als für Landmaschinen:
- Allradantrieb für Autos
- Hubschrauber-Rotor
- Aufhängung für Flugzeug-Kompasse
Erklärung:
Kardanfehler
Entstehung
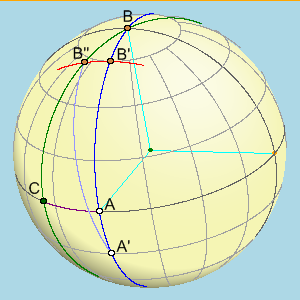
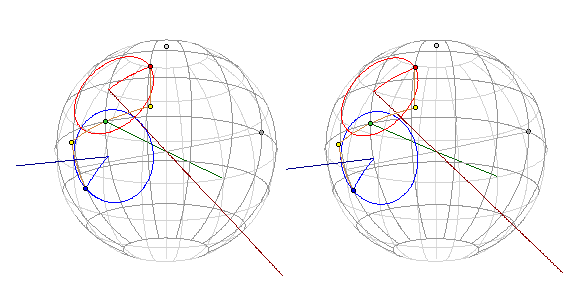
Auf dem blauen Kreis bewegt sich ein Punkt der ziehenden Querachse des Kardan-Gelenks und auf dem grünen Kreis ein Punkt der Querachse, die zu ihr über Kreuz steht. Diese Achse wird um 90° geschleppt (hellblauer Bügel). Die einlaufende Welle liegt auf der x-Achse und die auslaufende Welle ist in der x-y-Ebene und senkrecht zum grünen Kreis. Der Winkel zwischen dem grünen und blauen Kreis bzw. zwischen A und C ist der Knickwinkel des klassischen Kardan-Gelenks.
Steht nun zur Zeit t = 0 bei A auf dem Äquator ein Mann, dann befindet sich sein Hund bei B am Nordpol. (Äquator und Nordpol sind 90° entfernt.) Geht der Mann nun einen Breitenkreis in Richtung Süden nach A', dann zieht er den Hund 90° auf dem grünen Kreis in Richtung C hinter sich her. Der Hund landet dann nicht bei B' sondern bei B". Und B" liegt nicht auf dem gleichen Breitenkreis wie B', wie man auf dem Bild sehen kann (außer C liegt auf A, Knickwinkel 0°). D.h. der Hund geht erst etwas schneller. Ist Herrchen am Südpol angekommen, dann befindet sich nun der Hund auf dem Äquator bei C. Er ist also nach der halben Wegstrecke langsamer als sein Herrchen geworden, weil beide eine Wegstrecke von 90° zurücklegten. (Wegen der Symmetrie kann man auch einfach die Rollen Herrchen und Hund vertauschen, Herrchen geht dann von B" nach B und zieht den Hund von A' nach A hinter sich her.)
Das Pulsieren des Drehmoments (der Wechsel zwischen langsamer und schneller) ist umso stärker, je größer der Winkel zwischen A und C ist, weil der Punkt B" auf dem roten Kreis (nicht vollständig eingezeichnet) dann immer tiefer rutscht (=Schnittpunkt roter und grüner Kreis). Dieser Effekt ist unter dem Namen Kardanfehler bekannt.
Abhilfe
Es gibt mehrere Versuche, dem Kardanfehler abzuhelfen.
Der einfachste ist das Doppel-Kardangelenk oder Weitwinkelgelenk.
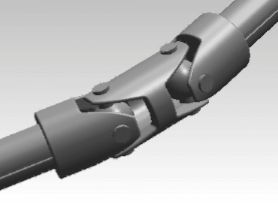
zwei miteinander verbundene Kardangelenke
(Bildquelle: Wikipedia)
(Bildquelle: Wikipedia)
Bei dieser Methode gleicht ein zweites Kardangelenk bei der Drehung immer den Fehler des ersten wieder aus. Der große Nachteil: der Steg in der Mitte muss immer zu beiden Achsen den gleichen Winkel haben und knickt man das Gelenk, dann bewegen sich beide Achsen aufeinander zu! Das ist alles nicht so gut.
Der nächste Versuch ist das Rzeppa-Gelenk. Hier wird die Kraft über Kugeln übertragen.
Rzeppa-Gleichlaufgelenk
(Bildquelle: Wikipedia)
(Bildquelle: Wikipedia)
Die Kugeln rollen in Furchen parallel zur Drehachse und können sich veränderten Winkeln anpassen. Die Nachteile sind: es ist nur ein geringer Winkel möglich, die Kugeln brauchen viel Schmierung und es gibt eine Problemstellung. Es ist möglich, dass wenn beide Achsen auf einer Geraden liegen, dann können die Kugeln frei tanzen. Geschieht das und erwischt man beim Knicken des Gelenks genau die beiden Kugeln, die aus der Reihe getanzt sind, kann das Gelenk brechen. Das ist nicht so gut.
Der nächste Versuch ist die Thompson Kupplung.
Thompson coupling
(Bildquelle: Wikipedia)
(Bildquelle: Wikipedia)
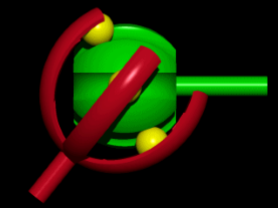
Der Erfinder Thompson verbesserte das Weitwinkelgelenk. Er reduzierte den Steg zwischen beiden Kardangelenken auf die Länge null und machte daraus einen virtuellen Ring. Den virtuellen Ring muss er nun irgendwie durch beide Achsen an zwei Punkten festhalten. Aus dem Ring macht er einen Halbkreis-Bügel und auf einer Seite hat er für den Platz. Der Bügel ist in obiger Skizze gelb.
Funktionsweise der Thompson coupling als 3D Stereoskopie
Er verlängert die eine Achse durch den Mittelpunkt und lässt zwei Punkte um die beiden Achsen 180° phasenverschoben rotieren. So gibt es einen Punkt, der immer in der Mitte von beiden liegt. Das ist die Richtung der Achse des Mittelstegs. Da der aber nicht immer den gleichen Abstand hat, hat Herr Thompson da die beiden symmetrischen Kniegelenke eingefügt. So geht das. Aber leider geht das nicht bei Winkeln von 0°±2°, denn dann rotieren beide Punkte auf dem gleichen Kreis und der Punkt in der Mitte ist nicht mehr fest. D.h. die Thompson coupling muss immer geknickt bleiben. Das ist nicht so gut. Auch braucht Thompson viele Achsen. Thompson hat halt nicht die allgemeine Schnittpunktformel!
Die Firma Soltuuli hat die allgemeine Schnittpunktformel.
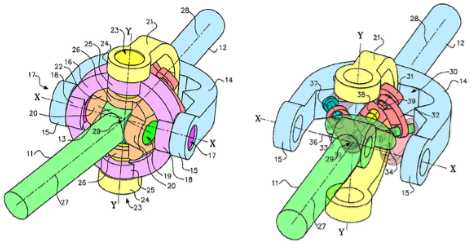
Ich habe zwei Holzmodelle von Gelenken gebaut, die den Kardanfehler und alle die genannten Nachteile der bisherigen Lösungen nicht mehr haben und ein Video dazu auf YouTube gestellt. Die Gelenke können sogar bis zu 95° knicken.
Das ist eigentlich alles naheliegend, man muss nur den Gedanken der Doppel-Hundekurven hier anwenden: Herrchen und Frauchen gehen auf Kreisbahnen mit gleichem Radius auf einer Kugeloberfläche spazieren und ziehen beide einen Hund nach sich her. Die beiden Leinen sind gleich lang. Also geht der Hund immer in der Mitte von beiden. Damit der Hund immer auf einem Großkreis gehalten wird, muss man dann einfach noch mehrere Pärchen mit Hund losschicken. Mittels einer Kreisscheibe oder einer "Krake" halten sich die Hunde dann gegenseitig auf dem Großkreis zwischen den Kreisen von Frauchen und Herrchen. Die Krake hat eine Achse für den Kopf und senkrecht dazu Achsen für die Arme, auf denen die Hunde gehalten werden. Damit sich Herrchen und Frauchen nicht gegenseitig auf die Füsse treten, schickt man sie auf Kreisbahnen auf Kugeln mit verschiedenen Kugelradien. Den Winkeln ist das egal.
Wenn das Video nicht angezeigt werden kann, den Firefox Browser nehmen!
Das neue Gleichlaufgelenk
von 0° bis 90°
perfekt!
(Dauer: 1 Minute und 7 Sekunden, nicht 1 Stunde und 7 Minuten)
perfekt!
(Dauer: 1 Minute und 7 Sekunden, nicht 1 Stunde und 7 Minuten)

YouTube-Video vom neuen Gleichlaufgelenk
Auf der Homepage www.pattakon.com hat sich auch jemand dazu Gedanken gemacht, doch hat er bei einem Bild vergessen, den "Krakenarmen" Spiel zu lassen. Und so kann das nicht funktionieren, weil die würden brechen, wenn man das baut und versucht zu knicken. Außerdem gibt es da eine Winkel-Oppositionsstellung, die das ganze auch mit Spiel brechen lassen würde.